Retrofit Existing Robot Cells Into Bounded Autonomy
Keep the robot. Add the Xolver brain around it.
Industrial teams should not have to replace working robot cells to make them more adaptive. Xolver Retrofit wraps existing robot cells with AI reasoning, safety checks, and a full audit trail — as an application layer around the existing machine, without replacing the controller.
Native OEM Compatibility
Xolver now includes native compatibility packs for leading industrial robot OEMs, making it easier to retrofit existing cells without rewriting your automation stack. Each pack standardizes controller metadata, runtime constraints, safety gates, and evidence workflows so teams can validate robots through the same Xolver safety and deployment pipeline.
Supported OEM Families
The Retrofit Studio Interface
Configure integration parameters, align CAD coordinate frames, calibrate cameras, and define safety zones directly through our console application.
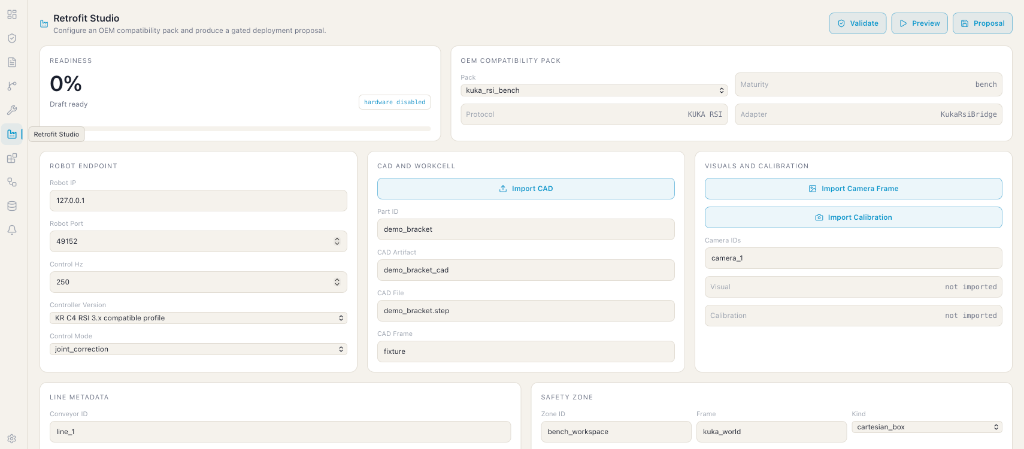
// Xolver Retrofit Studio: Commissioning setup for KUKA RSI bench workspace.
Configured in Studio
OEM Compatibility Pack
Select the manufacturer compatibility profile to bridge communication between Xolver and the existing robot controller.
CAD & Workcell import
Import 3D part models and workspace geometry. Align coordinate frames so the AI model has an accurate picture of the physical cell.
Visuals & Safety zones
Map cameras and configure safety zones (e.g. `bench_workspace` bounds) to constrain model actuation behavior.
What It Enables
Turn an existing cell into a skill-executing, contract-gated, evidence-producing workstation.
OEM Compatibility Packs
Deploy native connectivity profiles (starting with KUKA RSI, with support for Fanuc and other OEMs ready for PoC) that speak the controller's exact language out of the box.
CAD & Part Metadata Import
Load 3D CAD files (.step) and metadata definitions directly into the spatial reasoning coordinate workspace.
Sensor & Safety Setup
Interface cameras, fixtures, moving conveyors, and safety-zone grids into a unified calibration frame.
Dry-Run Validation
Simulate and validate path movements in a virtual twin environment before committing execution commands to hardware.
Path Previews & Safety Gates
Review model trajectory proposals filtered through active contract constraints and real-time collision boundaries.
Complete Audit Trail
Every proposed action is logged with the reason it was approved, modified, or refused — giving teams a reviewable record of every decision.
Controller Readiness
Before a robot is added to a live workflow, Xolver checks the controller profile, OEM pack, safety signals, and deployment mode.
Motion Preflight
Every proposed task can be checked against the workcell before the robot moves, reducing surprises during commissioning.
Staged Deployment
New cell behaviors can be introduced gradually, paused, or rolled back without turning every update into a risky all-or-nothing change.
Reusable Cell Behaviors
Once a workflow is approved for one compatible cell, it can be packaged, reviewed, and reused elsewhere with the same governance path.
Sensorized Gripper & Dexterous Hand Support
Bring richer manipulation capability to existing robot cells. Xolver now supports runtime profiles for sensorized grippers and dexterous robotic hands, allowing teams to evaluate contact, grip, and end-effector behavior as part of the same bounded autonomy workflow.
Contact-Rich Manipulation
For tasks where force, touch, slip, or precise handling matter, Xolver helps connect tactile end-effectors into the deployment path. Operators can inspect live state, validate safety readiness, and replay contact-rich runs with a clear record of what happened.
Supported End-Effector Profiles
Xolver's runtime contract layer now includes profiles for sensorized grippers and advanced multi-finger hands, including 17DoF, 20DoF, and 25DoF dexterous configurations for evaluation and integration workflows.
Most factory automation breaks at the boundary between perception, control, and safety.
A robot may be able to move. A vision system may be able to see. A model may be able to infer task intent.
But production teams still need to know exactly what the machine is allowed to do, what it refused to do, and why.
Designed Around That Boundary
Xolver Retrofit coordinates the components of adaptive cells securely:
- Models & Skills Propose:Visual models interpret the scene and propose kinematic paths.
- Contracts & Safety Layers Constrain:Deterministic constraints evaluate, refine, or block trajectories under the active runtime contract and safety policy.
- Runtime Adapters Translate:OEM bridges convert safe path data into controller-specific execution instructions.
Built As An Application, Not A Fork
Xolver Retrofit does not modify the core Xolver runtime brain. It plugs into the standard platform architecture through explicit integration points.
Core Integration Hooks
- Deployment contracts defining robot limits, workspace bounds, and safety rules
- Task-specific skill definitions describing what the robot is allowed to do
- Deployment blueprints linking safety layers, watchdogs, and approval gates
- Continuous safety monitoring with automatic halt on policy violations
- On-site runtime adapters connecting to local hardware networks
- Manufacturer compatibility packs bridging hardware communication protocols
- Studio-guided commissioning flows for initial setup and alignment
This keeps the core platform OEM-agnostic while allowing robot-specific behavior to live safely below the runtime contract layer.
{
"blueprint_id": "kuka_rsi_assembly_cell",
"oem_pack": {
"provider": "kuka_rsi_bench",
"protocol": "RSI_3.x",
"frequency_hz": 250
},
"safety_shield": {
"zone_id": "bench_workspace",
"limit_type": "cartesian_box",
"bounds": { "x": 0.8, "y": 0.8, "z": 0.6 }
},
"contracts": [
"joint_limit_watchdog",
"velocity_ceiling_gating"
]
}// Blueprint defines target pack configurations and seals them with active contract checks.
Planning a Retrofit Pilot?
Start with a technical assessment of your existing robot cell — what you have, what task you need to automate, and what safety constraints apply.
Discuss integration with an engineer
hello@xolver.aiFAQ
Do we need to modify our robot controller's core firmware?
No. Xolver Retrofit operates as an external application layer. It interfaces through controller-facing integration paths such as OEM compatibility packs rather than flashing custom firmware onto the robot controller.
How are safety constraints enforced on a retrofitted cell?
The retrofit path maps workspace boundaries, safety zones, active runtime contracts, and OEM adapter behavior into one reviewable deployment path. Proposed actions still pass through validation, safety shields, watchdogs, evidence checks, and approval gates before hardware motion.
What OEM compatibility packs are supported?
KUKA RSI bench workflows are the first active retrofit path. Additional compatibility profiles are being prepared for proof-of-concept validation across major industrial robot families.
Can a retrofit pilot start without replacing the existing cell?
Yes. Retrofit commissioning is designed to start from the existing controller profile, robot endpoint, workcell frames, safety zones, fixtures, calibration references, and declared task constraints.
Does preview readiness mean live readiness?
No. Preview readiness means the cell is described clearly enough to generate non-executable previews. Live readiness requires hardware-specific validation, connection readiness, safety hardware checks, operator approval, and deployment evidence.
What happens when a retrofit check is incomplete?
The path should remain blocked, limited to preview, or escalated for review. Missing controller metadata, stale scene context, absent safety-zone fields, or insufficient evidence should not be improvised into live motion.
Can retrofit deployments include tactile or dexterous end-effectors?
Yes. Xolver Retrofit can include supported sensorized grippers and dexterous hands as part of the deployment contract, allowing contact and grip state to be monitored alongside motion, safety, and evidence records.