Know exactly what your robot is doing and why — at all times.
Xolver runs on-site and keeps a complete record of every decision your machine makes.
If something goes wrong, you can replay it exactly. If you need to prove the system was safe before it ran, the record is already there. Every move your robot makes is logged with the full reasoning behind it — automatically.
What happens between "AI decides" and "robot moves"
Every move goes through six stages before the robot acts. Each stage is a check — not a shortcut. There is no direct path from the AI to the machine.
AI decides
The AI model proposes the next move based on what it sees
Translate
The proposal is converted into a standard format the system understands
Rules check
The proposed move is verified against your declared safety rules
Safety gate
Any move that violates physical limits is adjusted or blocked
Health monitor
Real-time health and timing are checked — if anything is wrong, the machine stops
Execute
The validated command is sent to the robot
This architecture is designed to prevent hidden shortcuts around the control path.
You set the rules once. The machine follows them exactly.
Before your robot ever runs, you define its rules — how far it can reach, where the safe zones are, what it's allowed to do, and how fast it can move.
Every run checks against those rules. If anything has drifted — a different robot model, changed boundaries, updated policy — the system flags it before anything moves.
This makes every deployment inspectable and repeatable: what ran on Monday is identical to what runs on Friday.
// What gets defined
Every move is filtered before it reaches the machine.
A safety check sits between the AI and the robot. Before any movement reaches the hardware, it's checked against your rules — boundaries, speed limits, workspace zones, operational policy.
If a proposed move is too close to a limit, too fast, or outside the allowed zone, it's adjusted or blocked. The machine only moves if the move is safe.
Every block is recorded
When a move is adjusted or blocked, that decision is saved — automatically. You can see exactly what the AI tried to do, what was blocked, and why. No separate logging setup needed.
The Xolver Console
The Console is where you set up, monitor, and review your deployments. Everything is visible — what's running, what's been approved, and what the record looks like before you sign off.
Set up once, deploy exactly — every time.
Define your robot's setup once — which AI model runs, what safety rules apply, which hardware it's connected to. The system locks it down and makes sure every deployment is identical.
Nothing gets changed silently. If something is different from what was approved, the system flags it before the machine runs.
What gets locked in:
- • AI model selection
- • Safety rules
- • Hardware connection
- • Health monitoring
- • Robot profile
- • Proof records
Before any machine runs, the full setup is verified against what was approved. No silent changes. No missing checks.
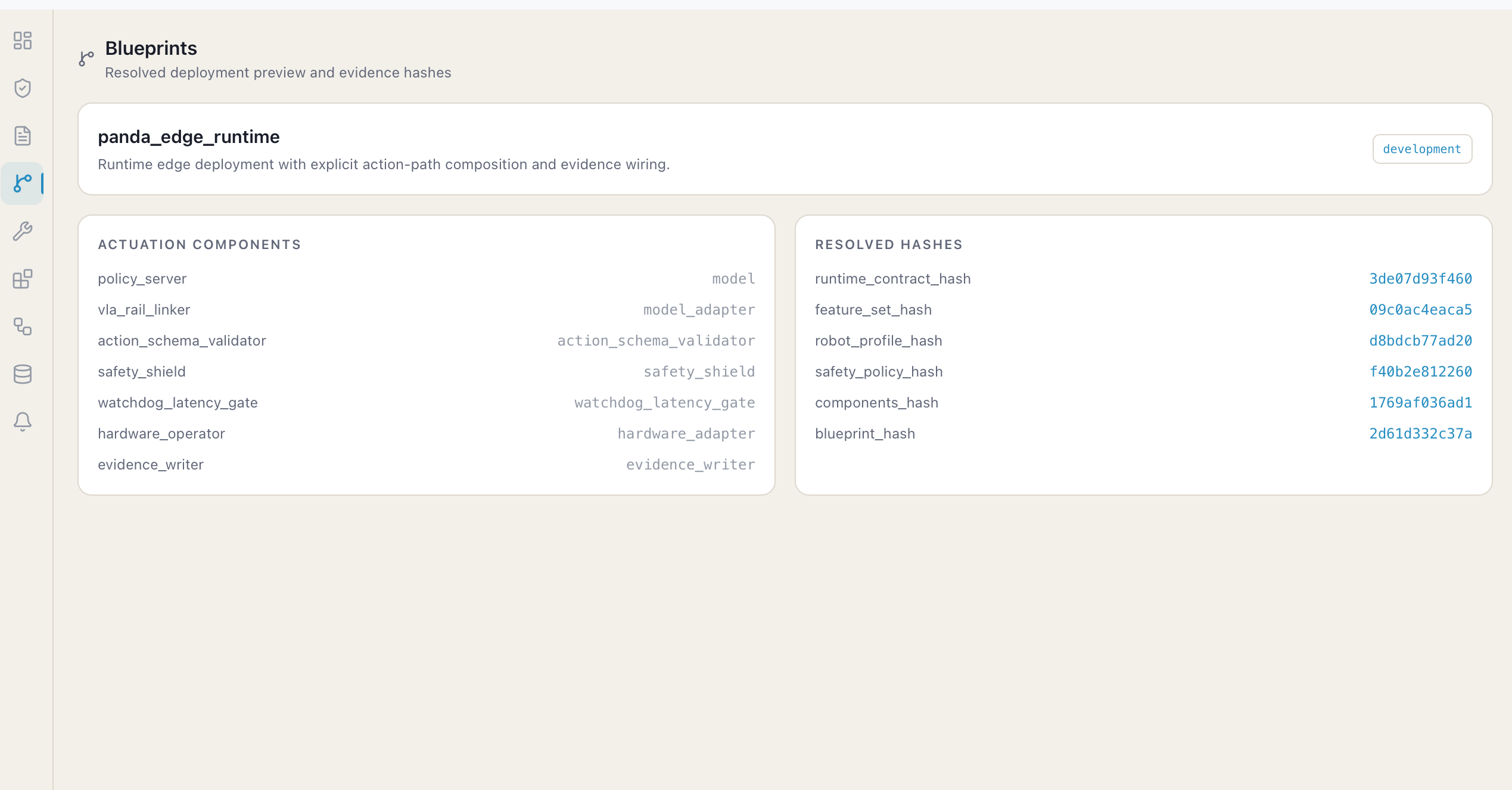
// Xolver Console: Inspecting panda_edge_runtime deployment blueprint and active hash values.
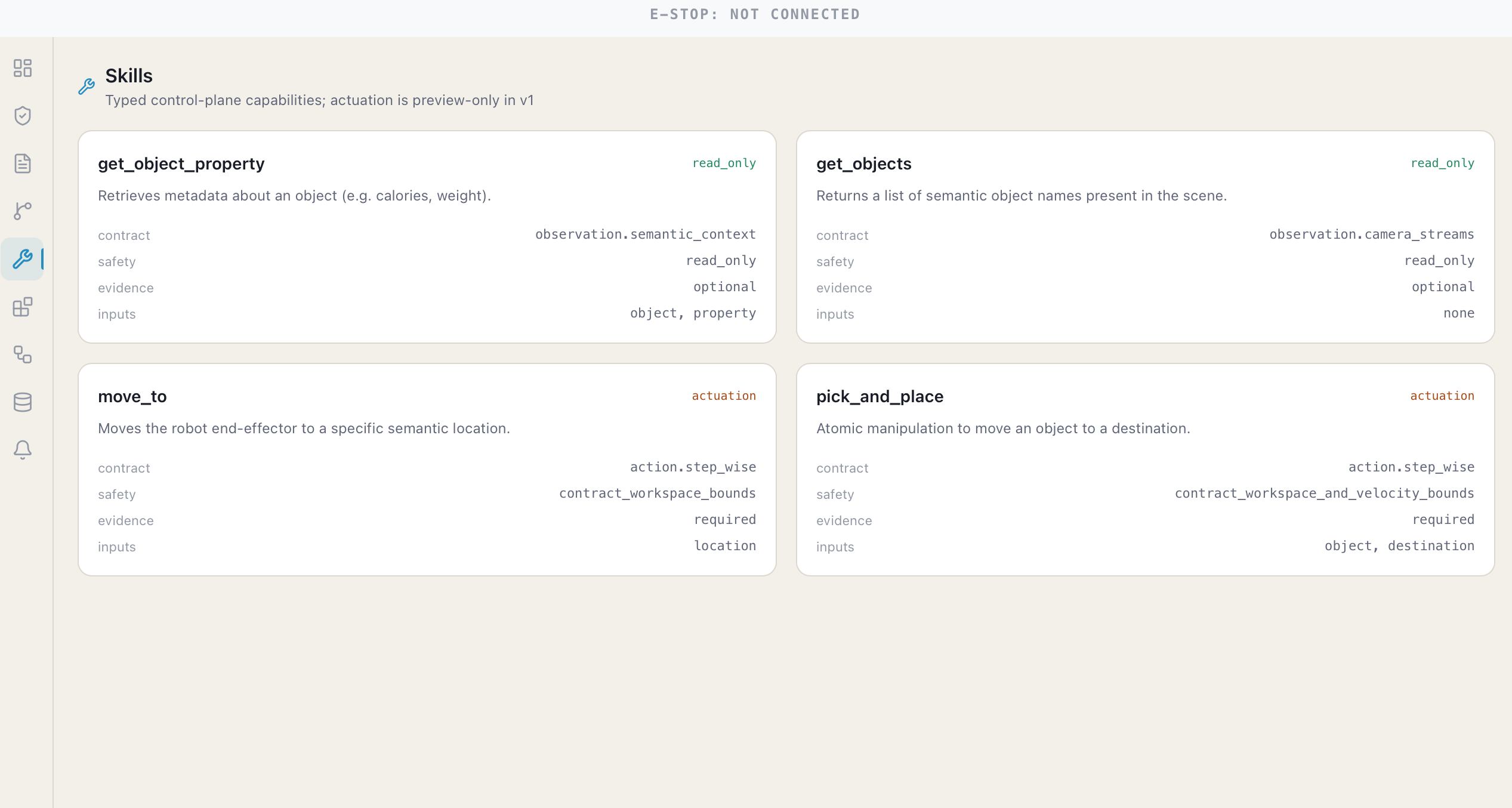
// Xolver Console: Previewing read-only perception queries and actuation skill schemas.
Pre-built actions your robot already knows how to do.
Xolver comes with a library of ready-to-use actions — picking, placing, inspecting, moving to a position. You can preview them in the Console before the robot does anything.
Previewing an action doesn't move the machine. It shows you what would happen — so you can review and approve it first. The robot only acts once a human has signed off.
Available actions include:
Looking and planning are always safe. Physical movement requires a human approval before the machine acts.
Replay any run. Understand exactly what happened.
Every run is recorded in full. You can replay it frame by frame and get clear answers to questions like:
- What was the robot asked to do?
- What setup was active when this run happened?
- What did the AI try to do, and what did the safety check change?
- What approvals were in place before this ran?
Records include every action, every intervention, every approval, and every safety event — ready for review, audit, or sign-off.
Built for real facilities, not just labs.
Xolver runs on-site at your facility — no cloud dependency for safety decisions. It monitors machine health continuously, stops cleanly when something is wrong, and keeps a record of every event. These are the basics factories and OEMs expect from a production system.
Each deployment is validated for its specific robot and task. You don't get a generic certification — you get proof that this machine, running this setup, was validated before it went live.
Ready when every check is complete
A deployment is considered ready only when the full checklist is done — the right robot, the right setup, safety controls verified, evaluator sign-off recorded, and every required test complete. The system won't let you skip steps.
Note: The platform as a whole is not generically certified. Certification-sensitive claims depend on the specific robot, task, runtime mode, evidence package, and validation process. This posture is intentional.
What Xolver does not do
- Does not send raw AI output directly to a machine.
- Does not let the AI bypass safety checks — ever.
- Does not certify robots generically — every certification is specific to the robot and task.
- Does not offer click-and-go deployments — every setup is reviewed and validated.
- Does not skip safety gates for any reason.
Deployment confidence is path-specific and evidence-driven.
What's ready today
Here's an honest picture of what's production-ready versus what's still deployment-specific.
Production-ready today
- Rules-first safety checks before every move
- Clear definition of what the AI can and cannot do
- Deploy setup inspection and locking
- Ordered, gated path from AI to machine
- Every unsafe move adjusted or blocked
- Machine health monitoring and emergency stop
- Full on-site event records
- Replay and proof records
- Human approval before any physical action
- Deployment-specific certification evidence
Deployment-specific or in progress
- New robot hardwareAdding support for new robot models requires an integration engagement.
- Production certificationsEach certification is specific to the robot, task, and operating environment.
- Custom task librariesCustom tasks are built per deployment — not available as a public marketplace.
Who this is for
Xolver is for teams taking AI from the lab to real factory floors — where safety, traceability, and operator control aren't optional.
Xolver handles the space between "the AI knows what to do" and "the machine does it safely."
Talk to us about your deployment
Whether you're evaluating Xolver for an existing facility or building something new — get in touch and we'll walk through what a deployment looks like for your specific setup.
Write to us at
hello@xolver.aiFAQ
Does previewing an action move the robot?
No. Previewing shows you what the robot would do — you can review it before anything physical happens. The machine only moves once you've approved the action.
What gets recorded for every run?
Every task, every move, every safety intervention, every approval, and every rejection — with enough detail to replay the run exactly and answer questions about it later.
Can Xolver certify my robot automatically?
No. Certification is specific to the robot, task, and operating environment. Xolver generates the evidence package — but the sign-off requires a human reviewer for that specific deployment.
What if my network goes down?
Xolver runs on-site at your facility. Safety checks, AI decisions, and logging all happen locally — a network drop doesn't stop your machines or affect safety.
Does Xolver work with my existing robot?
Xolver supports KUKA, FANUC, ABB, Universal Robots, and Yaskawa out of the box via Retrofit Studio. Other robot models can be supported through an integration engagement.
How does this fit with a retrofit project?
Retrofit commissioning uses the same system — the same safety gates, setup validation, compatibility packs, and proof records. The difference is you're applying it to an existing robot cell rather than a new one.